We are testing a high current ACIM for use as a generator.
This uses custom hardware controlled by a 28069 microcontroller.
It uses an encoder for position calculation and the slip magnetic angle from the SLIP_getMagneticAngle (slipHandle) call for controller input.
The software is based on Motorware 14 InstaSpin lab 5a
An example of using and ACIM as a generator is referenced in:
https://e2e.ti.com/support/microcontrollers/c2000/f/171/t/337405
This includes the following diagram.
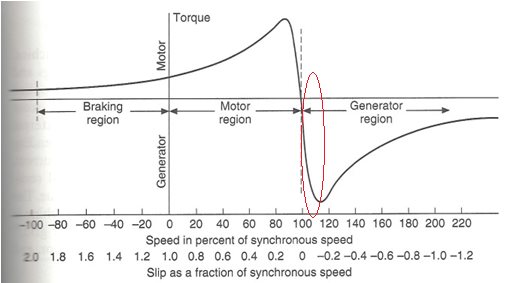
Our current motor to generator transition control is via changes in:
- direct current reference value (Id) and
- direct/quadrature current (Idq)
The questions that we have are:
- What other settings affect power generation and negative torque control?
- What controls can be used to tune this for more efficiency?
- What is the best way to control varying torque over time, both positive and negative?
- In the diagram the braking region takes place with positive torque. Is there a braking region with negative torque separate from the generator region?
I appreciate your assistance with these questions.
Thanks,
Allan